
定义
无人机是由控制站管理(包括远程操纵或自主飞行)的不载人航空器。
分类
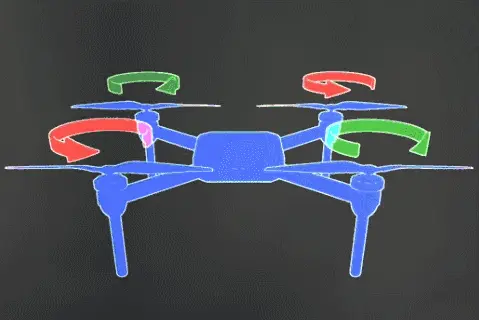
无人机通常分为固定翼无人机及多旋翼无人机,其中3轴及3个以上轴的无人机被称为多旋翼。
组成:
多旋翼无人机一般由机架、动力系统、飞控系统、遥控装置和任务载荷等系统组成,具体包括机架、起落架、电机、电调、电池、螺旋桨、飞控、遥控器、GPS、任务设备、数据链路组成。
![图片[1]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/b6c31d01d420240407162935-1024x315.png)
机架
机架是无人机的骨架,由机臂、机臂座、电机座、起落架、上板下板(机体承载板)等五部分组成,内部一般都装有飞控、数传系统、图传系统,下部大多安装有电池、以及云台、抛投器等任务载荷设备,顶部安装有定位系统GPS等,有承载无人机所有电子设备的功能,如图1,所有的电子设备都是固定在机架上才可以正常运行的。
![图片[2]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/7142b8354c20240407163342.png)
机架大小以轴距进行区分,轴距指的是对角线上两个电机轴的距离(以毫米为单位),通过轴距大小可确定无人机的型号(如图2),机架越大,需要的电机功率越大,桨叶也越大,否则无法克服自身重量,从而不能起飞;机架目前主要是塑料、碳纤维(碳纤维机械性能好,但价格更贵),我们看到的图1它的机架是有六条机臂,所以说是六轴飞行器,四条机臂的机架则是四轴飞行器,同时机架的强度和重量也是影响飞行器稳定的因素之一。
![图片[3]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/05266877d720240407163443-1024x458.png)
脚架
无人机起落和平放的承载部件,有助于避免螺旋桨离地太近,进而防止因碰撞造成的设备损坏;在起飞和着陆过程中,可有效减轻与地面直接接触带来的冲击,延长设备的使用寿命;有的脚架支持在飞行中收起来,不会阻挡相机拍照视野。
机臂
安装在机体上,在机臂尾端通过与电机座连接用来承载电机。
PCB板
主要作用是用于连接电池和电调的电路板,实现输入一个电压后输出多个电压。在接上电池后,分电板能够给各个模块供电,包括飞控、电调、电机等。
有部分机型可将PCB板与机身上下板结合起来,如F330、F450、S550等机型,上板与下板的作用为通过机臂座将上板与下板连接,可承载无人机电子元器件及机臂。
作用
依据电磁感应定律实现电能转化为机械能的装置,多旋翼无人机通常是直流无刷电机,在无人机中扮演动力输出的角色。驱动螺旋桨旋转继而产生升力,通过与电调的配合,拥有抵消螺旋桨在旋转过程中产生的扭矩及控制电机转速等功能,通过改变电机转速可调节无人机飞行姿态的功能。
工作原理
电流在经过电机线圈时会产生磁效应,从而与永磁铁发生同性排斥,异性吸引的效果,从而发生转动(如图3:电磁效应),无刷电机的电磁铁是固定在机座上的,不能转动,而永磁铁是有一个转动轴,并做为外壳在电磁铁的外部 (如图4:电机结构)
![图片[4]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/1ed045465c20240407164625.png)
![图片[5]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/95106a90f420240407164625.png)
图5内圈上看到的部分是电磁铁,而在外圈上安装有永磁体。电机开动后通过向其线圈输送电流来激活其中的一个电磁铁,这将使转子开始旋转,因为永磁体受到类似电磁体的排斥并试图与定子上的相反永磁体对齐。当电磁铁和相对的永磁体对齐时,这只会使它旋转一小段距离。电机通过对下一个电磁铁供电来使转子保持旋转,然后继续不断供电下一个电磁铁,周而复始依此类推。通过对电机以给定频率提供三相电流,转子将以等于该信号频率的速度旋转。无人机控制器上的油门用来控制电机的速度,加大油门会向无人机发送更高频率的信号。电子速度控制器(ESC)控制信号传递,根据油门的输入信号来调整电机的速度。
![图片[6]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/560d4514bc20240407164750.png)
![图片[7]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/1e1b1bee9a20240407165212.png)
型号及参数
无刷电机还有几个常见指标分别是定子高度,定子宽度和电机KV值。
我们通常在看电机参数时,可以看到电机型号会注明2212、2216、2312等等(如图6),前两个数字表示的是电机写字的直径,后两个数字表示的是电机定子的高度,单位均是毫米。
例如2212表示电机定子直径为22mm,定子厚度为12mm。2216表示电机定子直径为22mm,定子高度为16mm。简单来说,前面2位越大,电机越肥,后面2位越大,电机越高。又高又大的电机,功率就更大,适合做大四轴,其中电机CCW需要安装正浆(顶视逆时针旋转),电机CW需要安装反浆(顶视顺时针旋转)。
电机KV值
KV值表示电机在空载(不安装螺旋桨)的情况下,电压每增加1v,电机每分钟的转数增加,例如KV800,在1V的电压下空转转速是800转每分钟。10V的电压下是8000转每分钟的空转转速。
绕线匝数多的,KV值低,最高输出电流小,但扭力大;
绕线匝数少的,KV值高,最高输出电流大,但扭力小;
所以大KV配小桨,小KV配大桨;
KV值越小,同等电压下转速越低,扭力越大,可带更大的桨。KV值越大,同等电压下转速越高,扭力越小,只能带小桨。相对的说KV值越小,效率就越高。航拍要选用低KV电机配大桨,转速低,效率高转速低,效率高,同样低转速电机的震动也小。对航拍来说这些都是极为有利的。
电机效率
效率的标注方式是:G/W(克/每瓦)电机的功率和拉力并不是成正比的,也就是说50W的时候450g拉力,100W的时候就不是900g了,可能只有700g。具体效率要看电机的效率表。大多数的电机在3A~5A的电流下效率是最高的。
作用
桨叶是通过电机带动自身旋转,将电机转动功率转化为升力的装置。在整个飞行系统中,桨叶主要起到提供飞行所需的动能,也就是我们的升力
分类
螺旋桨根据旋转方向不同,分为正桨和反桨。其中CCW电机上面需要安装正浆,CW电机上面要安装反浆,正反桨区分通常看螺旋桨的朝向,螺旋桨朝右的为正桨(CCW),顶视逆时针旋转,螺旋桨朝左的为反桨(CW),顶视顺时针旋转(如图9)
![图片[8]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/914fbb519f20240407170802.png)
浆叶尺寸
尺寸通常用X×Y来表示,其中X代表螺旋桨直径,单位为英寸(in),Y代表螺距,即螺旋桨在空气中旋转一圈桨平面经过的距离,单位为英寸(in)。例如,22× 10的螺旋桨尺寸为桨径22in,约为55.88cm,螺距10in,约为25.4cm。
作用
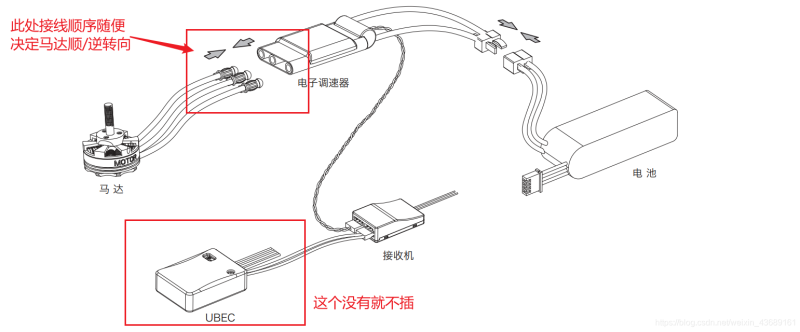
电调全称电子调速器,简称ESC。作用是根据飞控的PWM信号,将电池的直流输入转变为一定频率的交流输出给电机,用于控制电机的转速。同时与电机连接,输出三相交流电,可改变电机正转和反转(如图9)
![图片[9]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/4d7cf3347120240407171336-1024x455.png)
电机与电调的连接方法
![图片[10]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/d2b5ca33bd20240407171418.png)
电机油门行程校准方法
![图片[11]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/1d927acc0b20250916092622.jpeg)
![图片[12]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/df44f5968920250916092656.jpeg)
作用
电池是将化学能转化成电能的装置。在整个飞行系统中,电池作为能源储备,为整个动力系统和其他电子设备提供电力来源。
参数说明
目前在多旋翼飞行器上,一般采用锂电池(图11),标称电压一般为3.7V,但使用中的实际电压往是高于或低于这个标称电压的,锂聚合物单块电芯电池正常使用的最低电压是2.7V,最高是4.2V。
![图片[13]_多旋翼无人机各部件介绍-无人机社区](https://uav.worldhtyg.club/wp-content/uploads/2024/04/d2b5ca33bd20240407175252.png)
①电池容量(图11)
电池的容量是用毫安·时(mA·h)来表示的。它的意思是电池在1h内可以放出或充入的电流量。例如,1000mA·h就是这个电池能保持1000mA(1A)放电1h。最小的1S电池,代表3.7V电压,充满电为4.2V,放电后的单片保护电压为3.6V;S数越大,电池的电压越大。例如3S就是三片电芯串联起来电压为11.1V,充满电为12.6V。
②充/放电倍率
1)放电倍率
电池的放电能力是以倍数,即放电倍率(C)来表示的,即按照电池的标准容量可达到的最大放电电流。如5200mAh电池45C放电倍率,即电池最大可以达到5.2A*45=234A的放电电流。多旋翼无人机的电流比较大,因此需要高放电倍率的电池,此外,放电电流不但和C有关,还和容量相关,因此C小的电池有可能比C大的放电电流还要大。不论何种电池,放电倍率越大,寿命越短。
2)充电倍率
一般用于充电时限制最大充电电流,以免充电电流过大损害电池使用寿命,计算方法与放电电流相同、也用倍数(C)来表示。 C的倒数是电池放完电所用的时间,单位为h。不能用低C的电池大电流充放电,这样会使电池迅速损坏,甚至自燃。
3)串联并联数
经常用“XSXP”表示多少电芯并联或串联的情况。S(serice,串联)代表电池组中串联电池的个数,所以3S代表内有3个电芯串联。XP(parallel,并联)代表并联电池的个数。因此,2100mA·h电芯名为3S4P的电池组共有12个电芯。












- 最新
- 最热
只看作者