星球导航
航模
航模课堂
航模DIY
航模论坛
航模综合
无人机
新手课堂
DIY无人机
无人机论坛
无人机综合
服务支持
赛事汇总
政策法规
飞行操控
对外服务
严选好物
人才就业
飞行学院
标签汇总
精品工具
联系我们
社区交流
发布
发布帖子
发布文章
开通会员
开通黄金会员
①严选内容免费阅读
②推广返佣为收入的20%
③免费资源每日可下载3个
④购买付费资源积分打8折
⑤VIP用户专属社群服务哦
⑥可向World领取一次远程检修无人机机会
开通黄金会员
开通钻石会员
①全站严选内容免费阅读
②用户全站可上传视频
③推广返佣为收入的50%
④免费资源每日可下载5个
⑤购买付费资源积分打6折
⑥推广内容收益享20%分成
⑦VIP用户专属社群服务哦
⑧可向World领取一次远程检修无人机机会
开通钻石会员
开通会员 尊享会员权益
登录
注册
找回密码
快速登录
QQ登录
微信登录
星球导航
航模
航模课堂
航模DIY
航模论坛
航模综合
无人机
新手课堂
DIY无人机
无人机论坛
无人机综合
服务支持
赛事汇总
政策法规
飞行操控
对外服务
严选好物
人才就业
飞行学院
标签汇总
精品工具
联系我们
社区交流
开通会员 尊享会员权益
登录
注册
找回密码
快速登录
QQ登录
微信登录
优质内容
超多精品,包罗万象
更多
921人已阅读
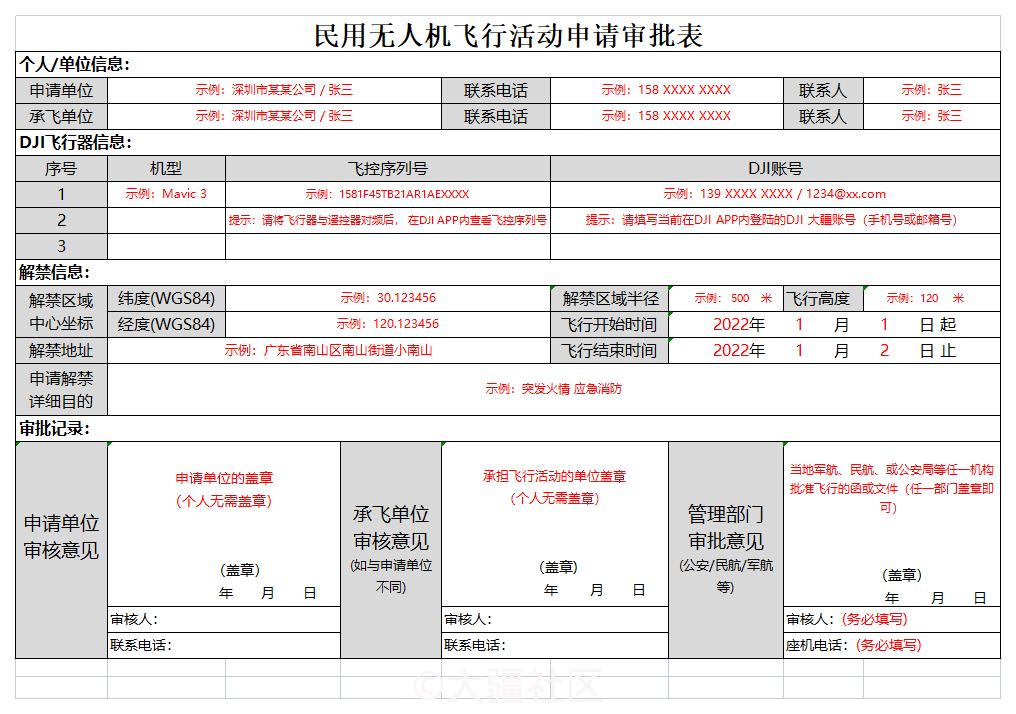
如何申请解除禁飞区
TOP1
大疆无人机邮寄与携带登机常见问题
1年前
747人已阅读
TOP2
遥控器无法连接手机,如何处理
1年前
707人已阅读
TOP3
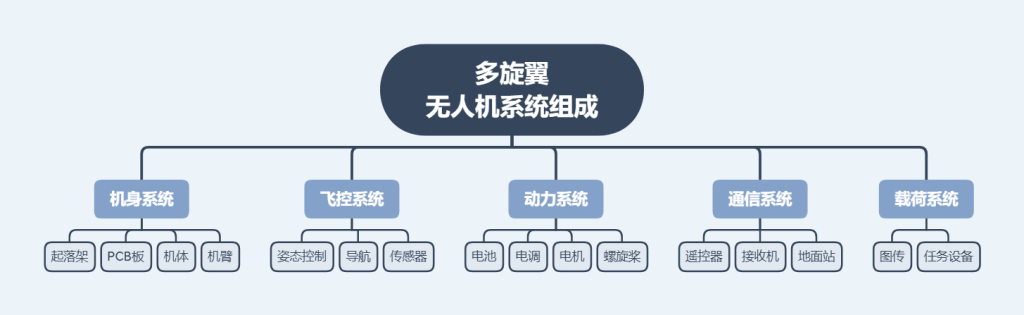
多旋翼无人机各部件介绍汇总
1年前
662人已阅读
TOP4
无人机及航模常见赛事汇总
12个月前
660人已阅读
TOP5
关注
综合
圈子
热门
精华
问答
投票
最高评分
最多收藏
WorldUAV
1年前发布
248次阅读
关注
私信
已解决
为什么经/纬度不属于无人机飞控子系统所需要信息?
WorldUAV
作者
超级版主
0
经纬度是导航子系统需要的数据信息,飞控子系统控制无人机的姿态飞行,就需要空速信息和姿态角信息。 在航空航天领域,姿态角是指物体相对于参考坐标系的三维角度。 具体来说,姿态角包括: 俯仰角(Pitch Angle):物体在垂直平面内相对于参考坐标系的角度,通常以向上为正; 滚转角(RollAngle):物体在水平平面内相对于参考坐标系的角度,通常以向右为正; 偏航角(YawAngle):物体在水平面内相对于参考坐标系的角度,通常以向前为正。
题库解析
评分
1
分享
WorldUAV
1年前发布
240次阅读
关注
私信
已解决
什么功能是向无人机各用电气系统或设备提供满足预定设计要求的电能?
WorldUAV
作者
超级版主
0
由供电系统功能。 供电系统是指为设备、设施和场所提供电力的系统。它包括发电设备(如发电机、风力发电机、太阳能电池板等)、输电线路、变电站和配电设施等; 配电系统是指将电力从供电系统分配到各个用电设备的系统。它包括配电柜、开关、电缆、保护设备和监控设备等; 电源是指为设备提供电力的装置。它可以是电池、发电机、电源适配器等。电源的主要作用是将电力转换成设备所需的形式,如直流电、交流电等。
题库解析
评分
1
分享
WorldUAV
1年前发布
238次阅读
关注
私信
已解决
无人机电气系统为什么一般包括电源、配电系统、用电设备三部分?
WorldUAV
作者
超级版主
0
电气系统是指由电源、电路、电器元件和控制装置组成的,用于产生、传输、分配和使用电力的系统。 电源:提供电力的来源,如电池、发电机等; 电路:由电线、电缆和开关等组成,用于传输和分配电力; 电器元件:如灯泡、电机、变压器、电容器等,用于将电力转换成其他形式的能量,或者执行特定的功能; 控制装置:如开关、继电器、控制器等,用于控制电力的流动和电器元件的工作。
题库解析
评分
1
分享
WorldUAV
1年前发布
237次阅读
关注
私信
已解决
无人机气垫着陆的优点为什么是①不受无人机大小②不受无人机重量限制③回收效率高
WorldUAV
作者
超级版主
0
气垫着陆是一种用于无人机和其他航空器的着陆技术。它利用气体在地面上形成一层气垫,从而减少着陆时的冲击力,实现平稳着陆。 气垫着陆的基本原理是:在航空器着陆前,向地面喷出高压气体,使气体在地面上形成一层气垫。当航空器着陆时,气垫能够吸收着陆时的冲击力,从而减少航空器的震动和损坏。 相对于传统的着陆方式,气垫着陆具有以下优点: 1、减少着陆时的冲击力,实现平稳着陆,减少航空器的震动和损坏; 2、不受地形和天气的限制,能够在各种地形和天气条件下进行着陆; 3、对于传统的着陆方式,能够减少航空器的能耗,提高效率; 4、提高着陆的安全性和可靠性,减少着陆时的事故发生率。
题库解析
评分
1
分享
哈哈
1年前发布
232次阅读
关注
私信
已解决
无人机气垫着陆的优点
为什么气垫着陆优点为不受无人机大小,重量限制,且回收效率高
WorldUAV
超级版主
0
气垫着陆是一种用于无人机和其他航空器的着陆技术。它利用气体在地面上形成一层气垫,从而减少着陆时的冲击力,实现平稳着陆。 气垫着陆的基本原理是:在航空器着陆前,向地面喷出高压气体,使气体在地面上形成一层气垫。当航空器着陆时,气垫能够吸收着陆时的冲击力,从而减少航空器的震动和损坏。 相对于传统的着陆方式,气垫着陆具有以下优点: 1、减少着陆时的冲击力,实现平稳着陆,减少航空器的震动和损坏; 2、不受地形和天气的限制,能够在各种地形和天气条件下进行着陆; 3、对于传统的着陆方式,能够减少航空器的能耗,提高效率; 4、提高着陆的安全性和可靠性,减少着陆时的事故发生率。
题库解析
评分
1
分享
WorldUAV
1年前发布
226次阅读
关注
私信
已解决
为什么指令控制是飞行控制的方式之一?
WorldUAV
作者
超级版主
0
无人机指令控制是指通过发送指令来控制无人机的飞行。这些指令通常是通过无线电或其他通信技术发送的,并且可以指定无人机的飞行高度、速度、方向和其他操作参数。 无人机指令控制系统通常包括一个地面控制站和一个无人机上的接收器。地面控制站可以是一台计算机、平板电脑或智能手机,它可以发送指令并监控无人机的飞行状态。无人机上的接收器接收指令并执行相应的操作。 无人机指令控制系统通常使用多种技术,如 GPS、惯性导航系统、超声波传感器和摄像头等,来帮助无人机确定其位置、姿态和环境。这些技术可以帮助无人机在飞行过程中保持稳定和安全。
题库解析
评分
1
分享
上一页
1
…
4
5
6
7
8
9
下一页
跳转
Hi!请登录
登录
注册
社交账号登录
QQ登录
微信登录
优质内容
超多精品,包罗万象
更多
921人已阅读
如何申请解除禁飞区
TOP1
大疆无人机邮寄与携带登机常见问题
1年前
747人已阅读
TOP2
遥控器无法连接手机,如何处理
1年前
707人已阅读
TOP3
多旋翼无人机各部件介绍汇总
1年前
662人已阅读
TOP4
无人机及航模常见赛事汇总
12个月前
660人已阅读
TOP5
精选帖子
超多精品,包罗万象
更多
登录
没有账号?立即注册
邮箱
验证码
发送验证码
记住登录
账号密码登录
登录
用户名或邮箱
登录密码
记住登录
找回密码
|
免密登录
登录
社交账号登录
QQ登录
微信登录
注册
已有账号,立即登录
设置用户名
设置密码
重复密码
注册
扫码登录
使用
其它方式登录
或
注册
扫码登录
//网站预加载 JS 脚本

 作者超级版主
作者超级版主 作者超级版主
作者超级版主